|
I am a Perception Engineer at Agility Robotics, where I develop models for human-centric robots to navigate warehouse settings. I completed my M.S.E. in Robotics at the University of Pennsylvania (GRASP Lab), where I was advised by Professor Jianbo Shi. I received my B.S.E. with Honors at Princeton University, under the guidance of Professor Niraj Jha. My interests mainly lie in Computer Vision, Deep Learning, and Machine Learning.
|

|
|
|
|
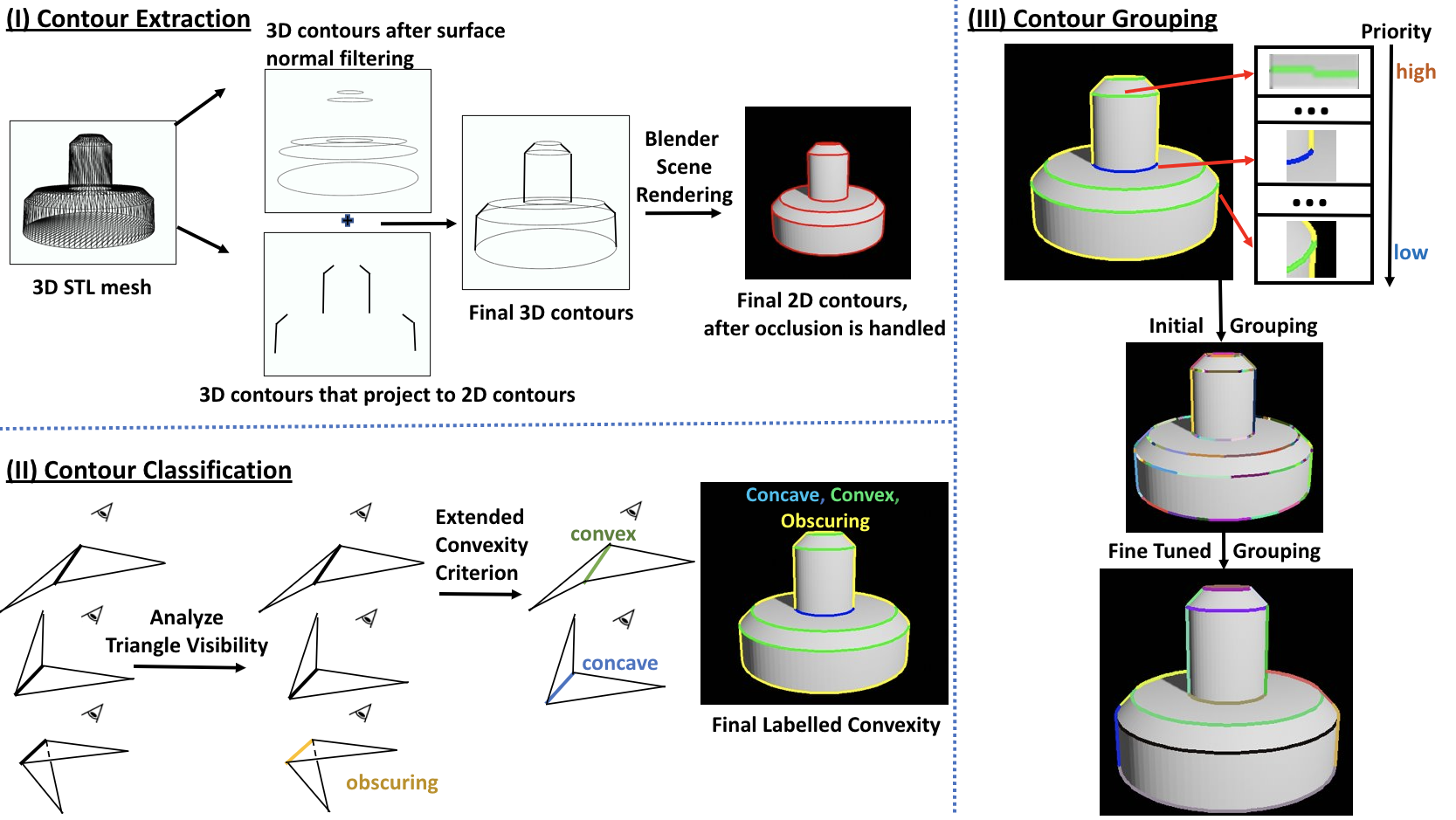
Hari Santhanam*, Nehal Doiphode*, Jianbo Shi IEEE/CVF Winter Conference on Applications of Computer Vision (WACV) , 2023 Understanding the finer details of a 3D object, its contours, is the first step toward a physical understanding of an object. Many real-world application domains require adaptable 3D object shape recognition models, usually with little training data. For this purpose, we develop the first automatically generated contour labeled dataset, bypassing manual human labeling. Using this dataset, we study the performance of current state-of-the-art instance segmentation algorithms on detecting and labeling the contours. We produce promising visual results with accurate contour prediction and labeling. We demonstrate that our finely labeled contours can help downstream tasks in computer vision, such as 3D reconstruction from a 2D image. |
|
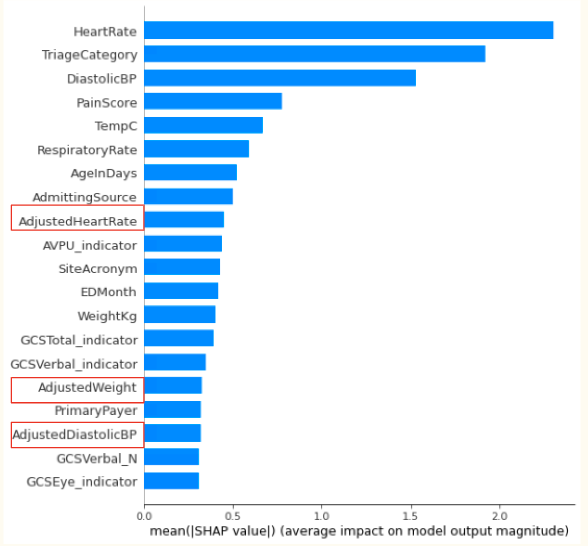
Hari Santhanam, Tony Liu, Lyle Ungar, and University of Utah Pediatric Sepsis Team Manuscript in Preparation We show the benefit of creating feature sets and adjusting features to remove collinearity and enhance explainability in a Pediatric Sepsis Case Study. |

|
Undergraduate Senior Thesis, advised by Professor Niraj Jha We show the ability to perform DeepInversion, a method used to synthesize images from the distribution used to train an image classification network, on the Mask R-CNN segmentation architecture. |
|
|

|
Object Detection and Tracking Perception Engineer Creating datasets to enhance the object detection and tracking system on human-centric robots. |

|
Advanced Research and Development Intern Improved Mask R‑CNN segmentation performance in new sensor setting by performing domain adaptation with generated synthetic data. Placed foreground objects into new sensor setting’s background based on derived distribution and used GAN to create realistic blending. |
|
UPenn Graduate TA for CIS581: Computer Vision and Computational Photography |
|
Princeton University Wind Ensemble, Princeton University Club Tennis |